Engineering Projects
Exploring the intersection of mechanical engineering, robotics, and design.
ActiveUMI: Robotic Manipulation with Active Perception
ActiveUMI: Robotic Manipulation with Active Perception
Co-authored research on a framework for robotic manipulation with active perception from robot-free human demonstrations. ActiveUMI couples a portable VR teleoperation kit with sensorized controllers, learning the crucial link between visual attention and manipulation.
Policies trained exclusively on ActiveUMI data achieve 70% success rate on bimanual tasks and demonstrate strong generalization, retaining 56% success rate on novel objects and environments. Accepted to ICRA 2026.
Co-authors: Qiyuan Zeng, Chengmeng Li, Zhongyi Zhou, Junjie Wen, Guorui Feng, Yichen Zhu, Yi Xu
Keys of the Citadel – ME 103

Keys of the Citadel – ME 103
My final project for ME 103 (Manufacturing Processes) at Stanford. Keys of the Citadel is a wall-mounted key rack combining functional storage with a suspended bronze flying carpet illusion. The form is inspired by Egyptian architecture, featuring domes, arches, and pillar-like hooks that frame the carpet.
The carpet is cast in bronze, then machined using a 3D-printed fixture on the mill. The cherry plycore body is laser-cut and hand-finished with a dark recessed backing to keep the monofilament suspension visually quiet. The hooks are turned aluminum on the lathe, assembled using hidden fasteners.
Processes: Sand casting, Pattern making, Milling, Turning, Laser cutting, Wood finishing, Assembly
Materials: Cast bronze, Turned aluminum, Cherry plycore, Monofilament line, Matte vinyl / dark backing, Stainless steel fasteners
Olympic Podium – ME 102
Olympic Podium – ME 102
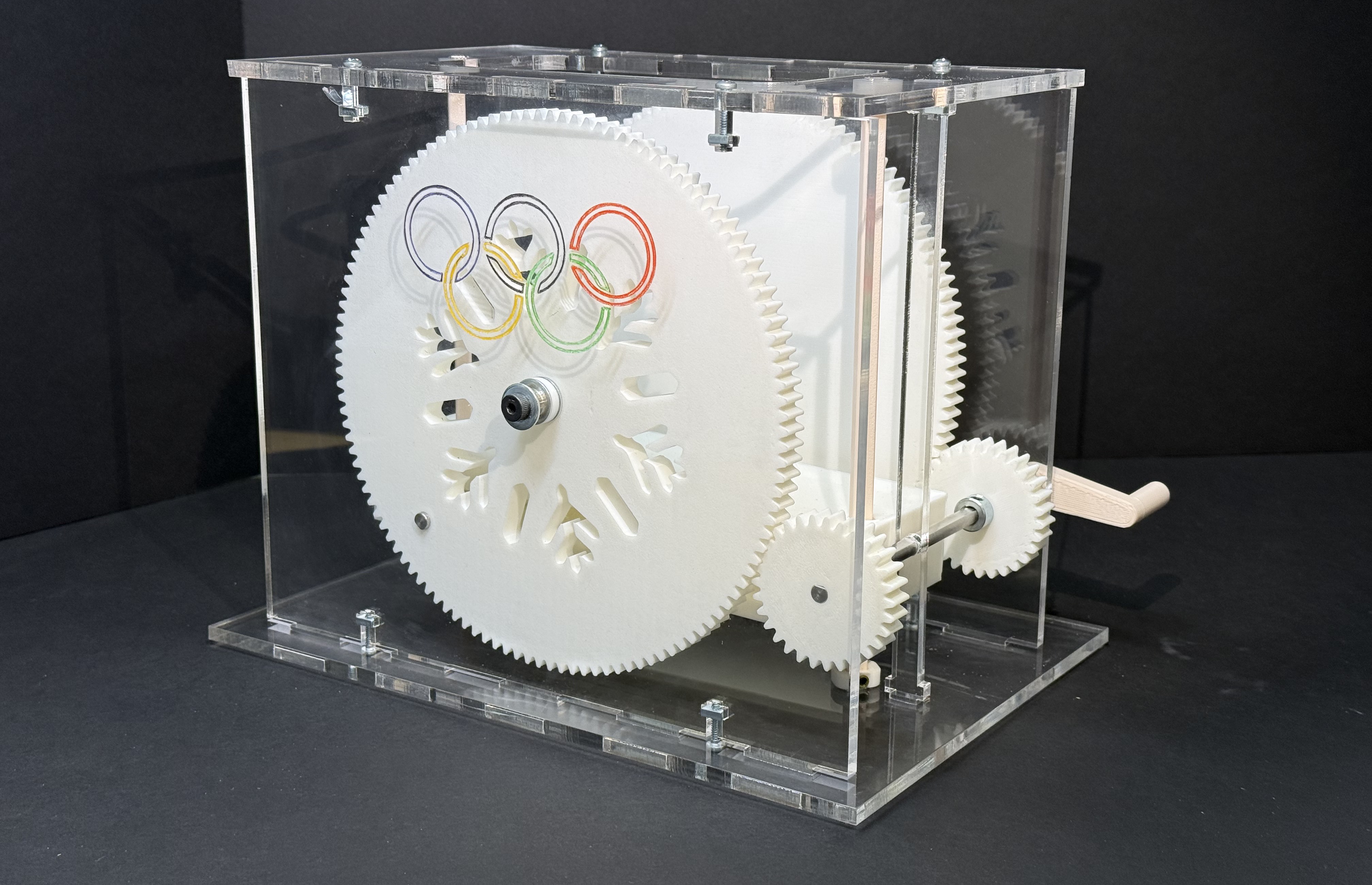
For ME 102: Foundations of Product Realization, we were tasked with designing and building a podium for the Winter Olympics 2026 that raises athletes to the award platform, converting rotational motion into linear motion. We adapted the scotch yoke mechanism to fit the project constraints.
We wanted to stay true to the Olympic brand, incorporating the logo and winter elements into the design.
Project partner: Minoo Jang.
FIRST Robotics: Omnicats 1452
FIRST Robotics: Omnicats 1452
As co-captain of my high school's robotics team, I supported our team every step of the way as we designed, built, and refined our robot from scratch, winning various awards in Canada and Los Angeles.
Sizzle reel created in After Effects.
Babel Infinity Mirror
Babel Infinity Mirror
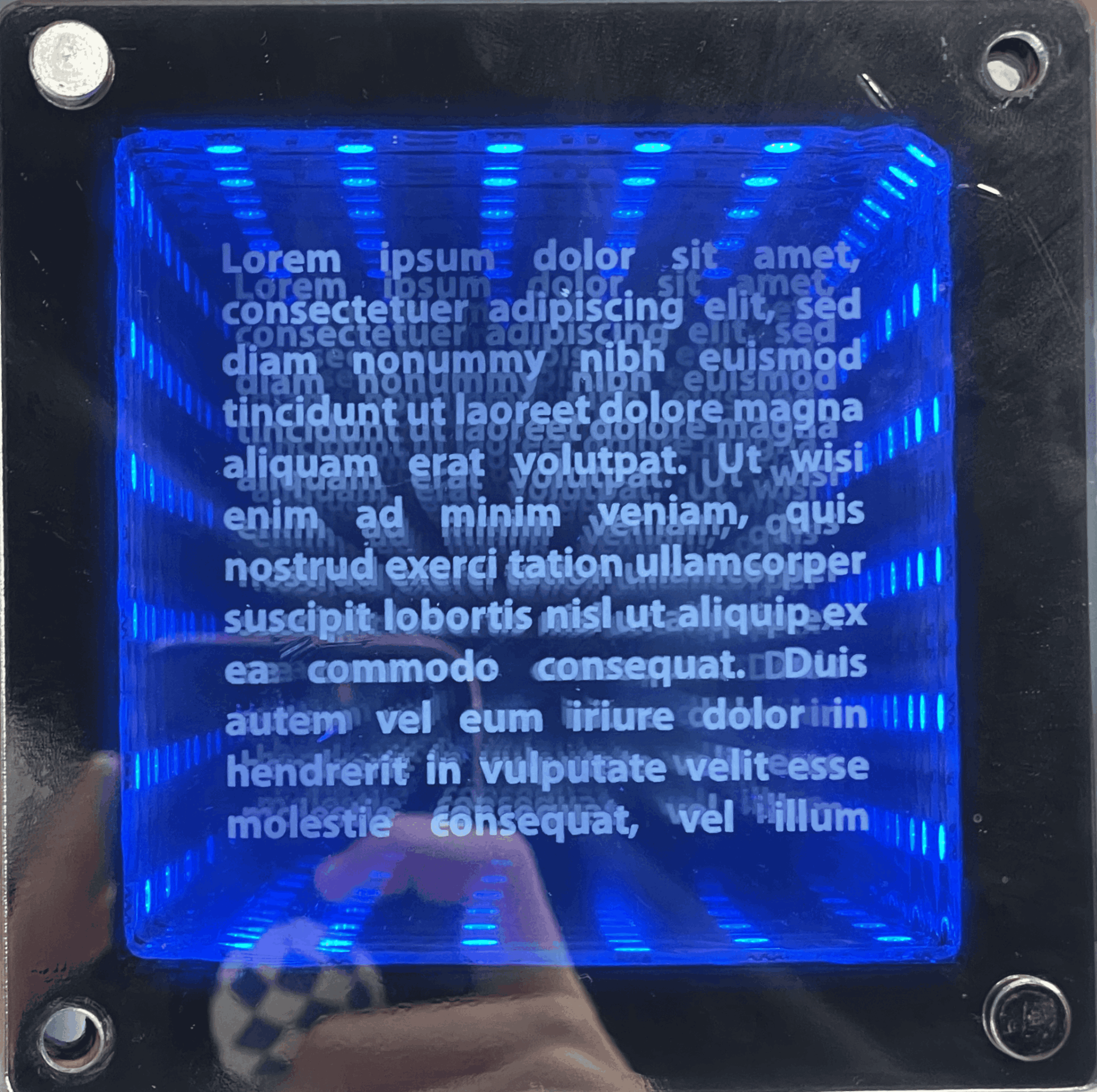
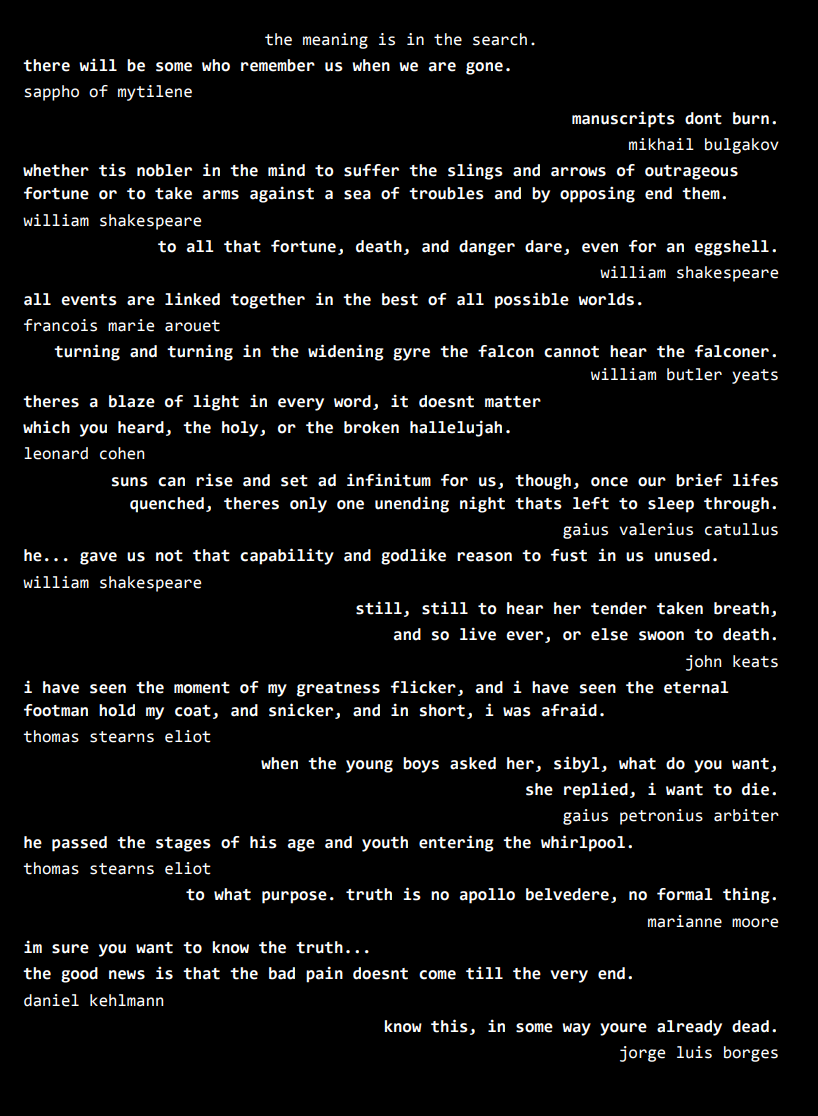
This infinity mirror made for my AP Literature class is based on Jorge Luis Borges's Library of Babel. Etched on the mirror is a page from the Library's Bible (representing the meaning of life), which is repeated ad infinitum in this display.
Instructor: Maja Starcevic.
R4 Alarm
R4 Alarm
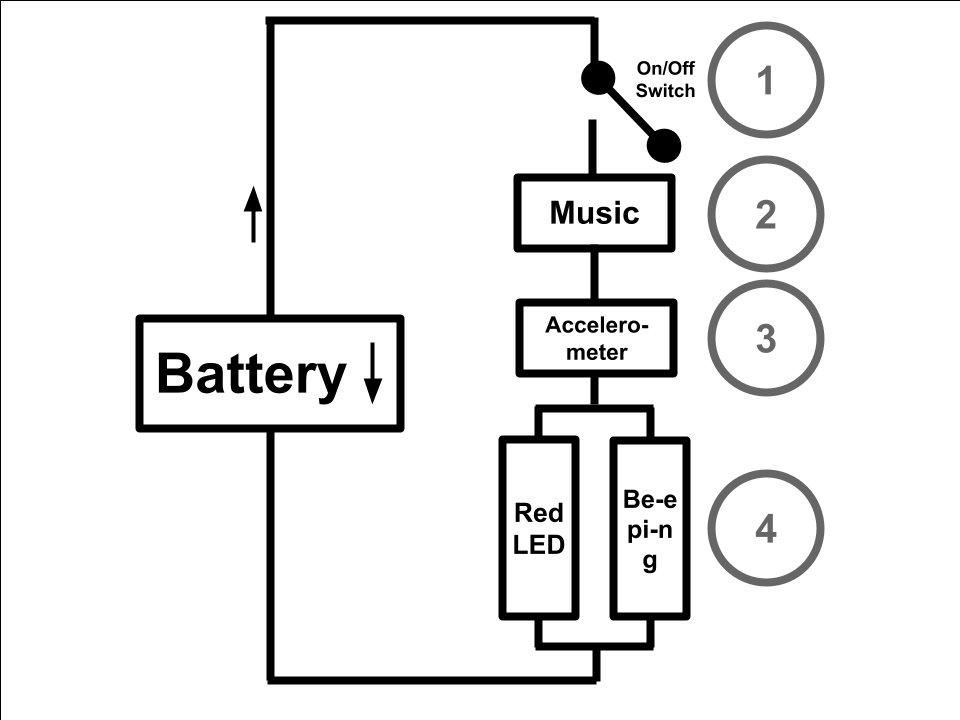
Soldered and laser cut to repurpose a kid's toy into a door-mounted alarm/chime.
Instructor: Max Nishimura.
Theater Booth Cable Pole Stoppers
Theater Booth Cable Pole Stoppers
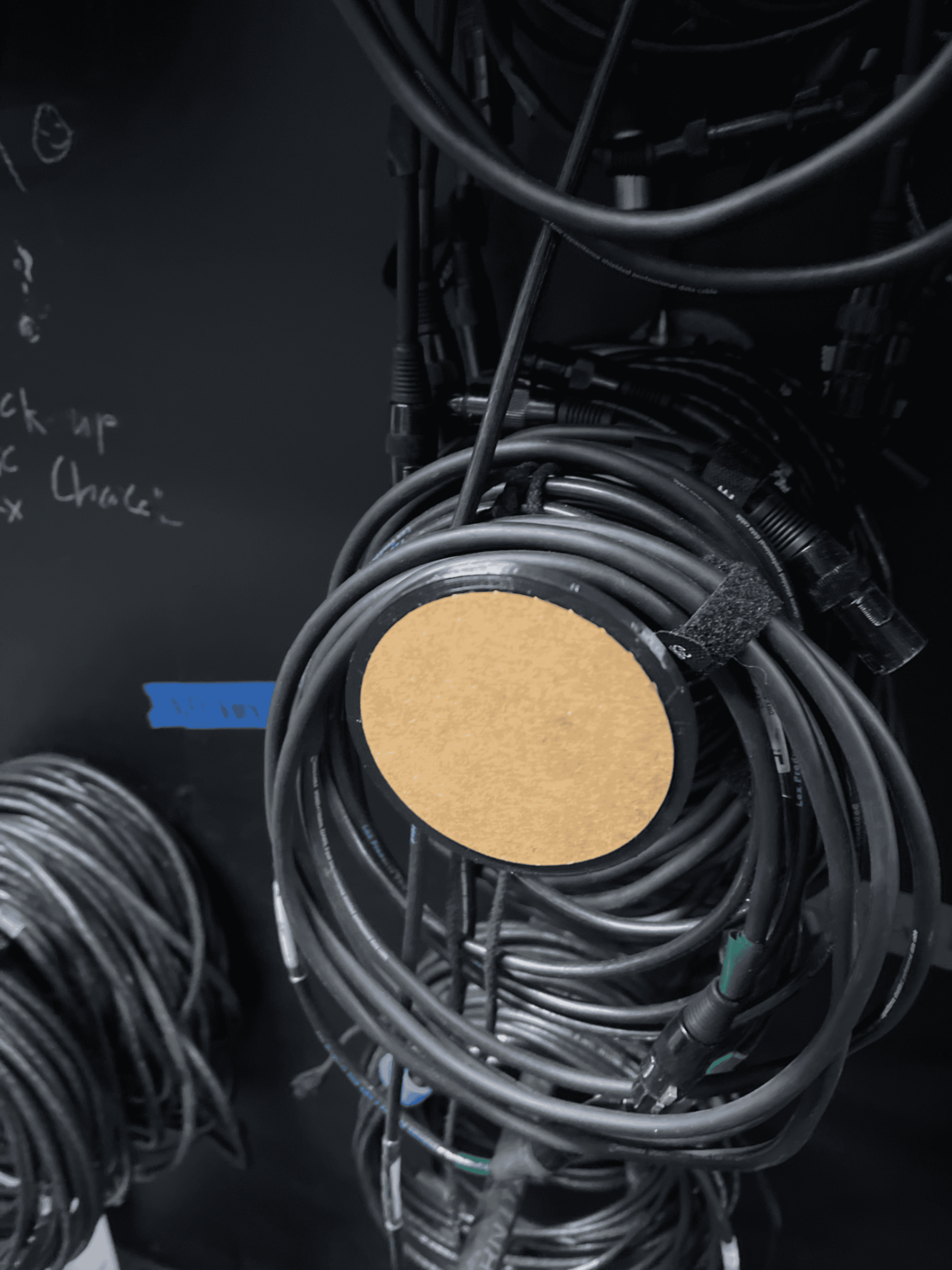
I was tasked with designing pole stoppers for my high school theater program's wall of cables, adding labels to each stopper.
I designed a 3D-printable model with room for an engraved acrylic piece to label and color code cables by length and type.
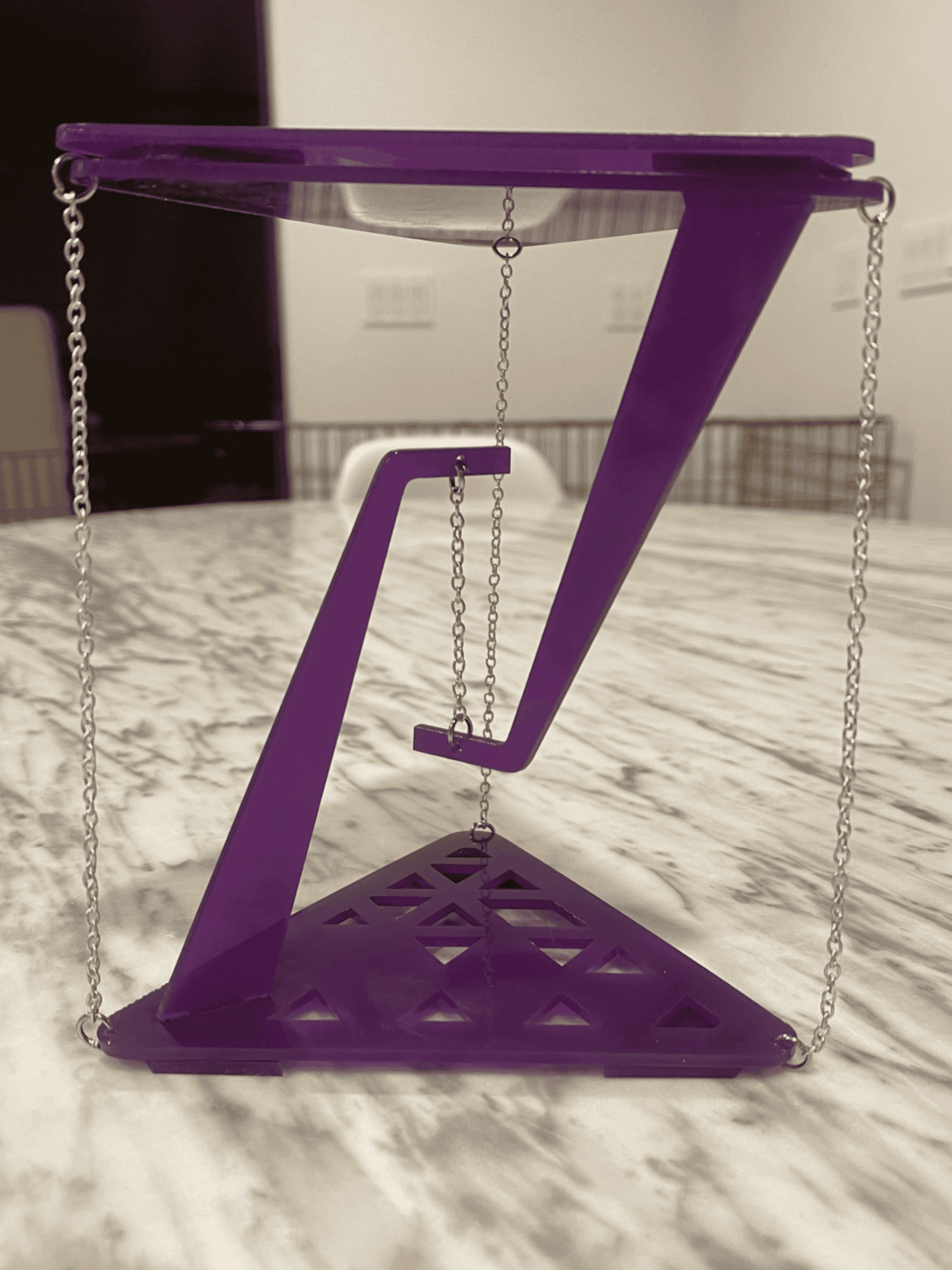
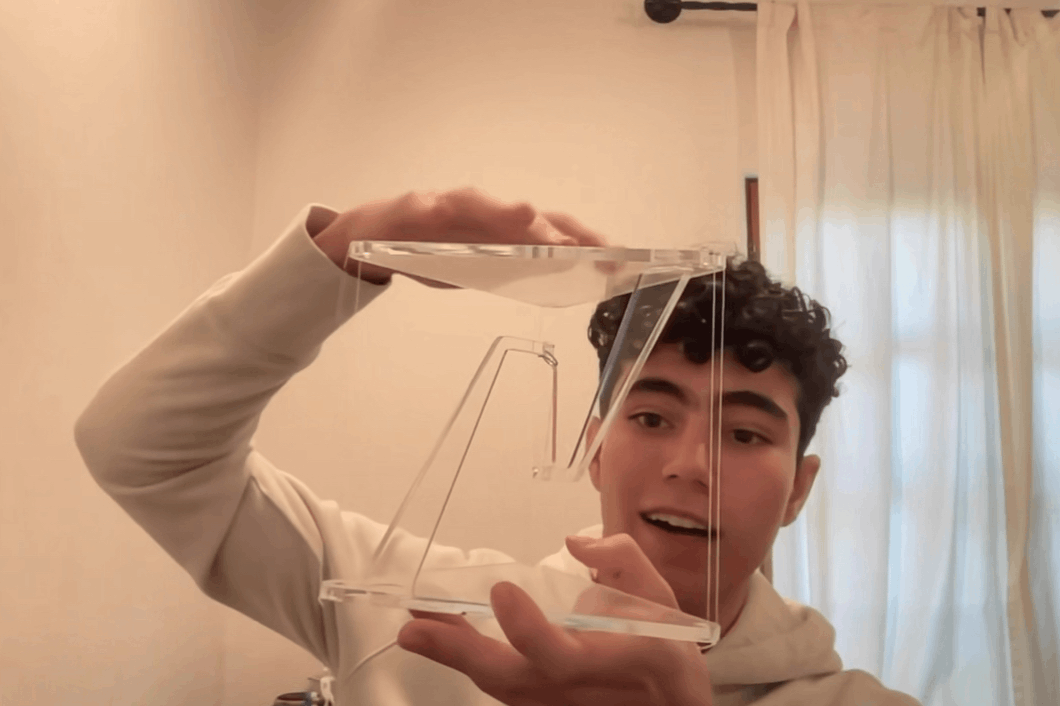
Tensegrity Models
Tensegrity Models
I adapted online resources to fabricate a few tensegrity models, showcasing how tension and compression can come together to make an object "levitate."